


BrickGPT: Generating Physically Stable and Buildable LEGO Designs from Text
ICCV 2025
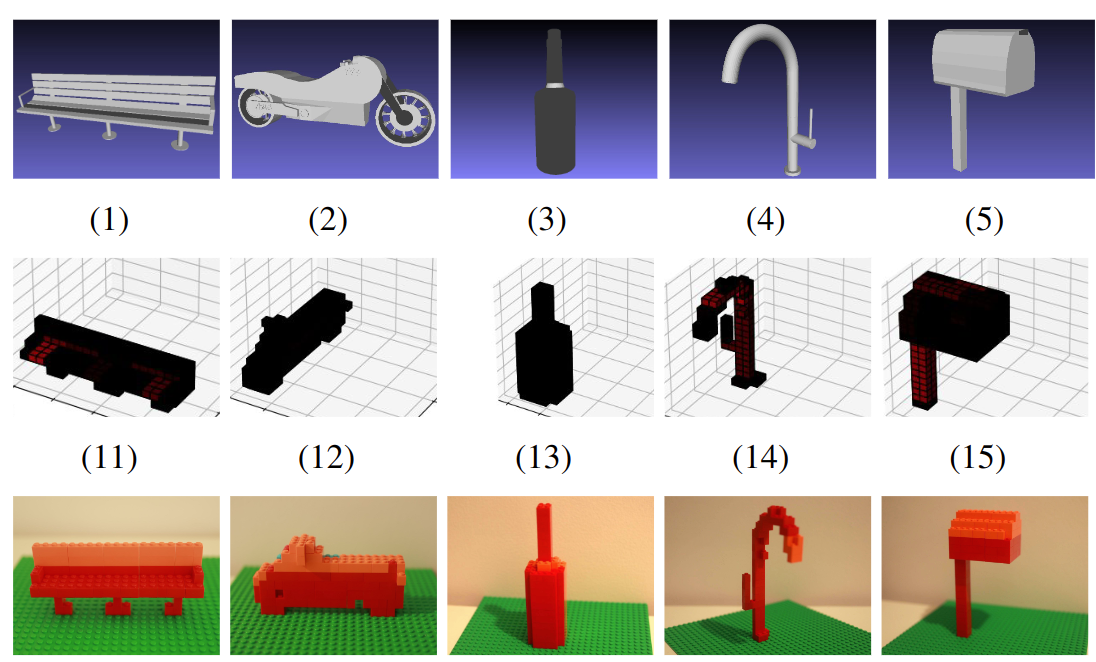
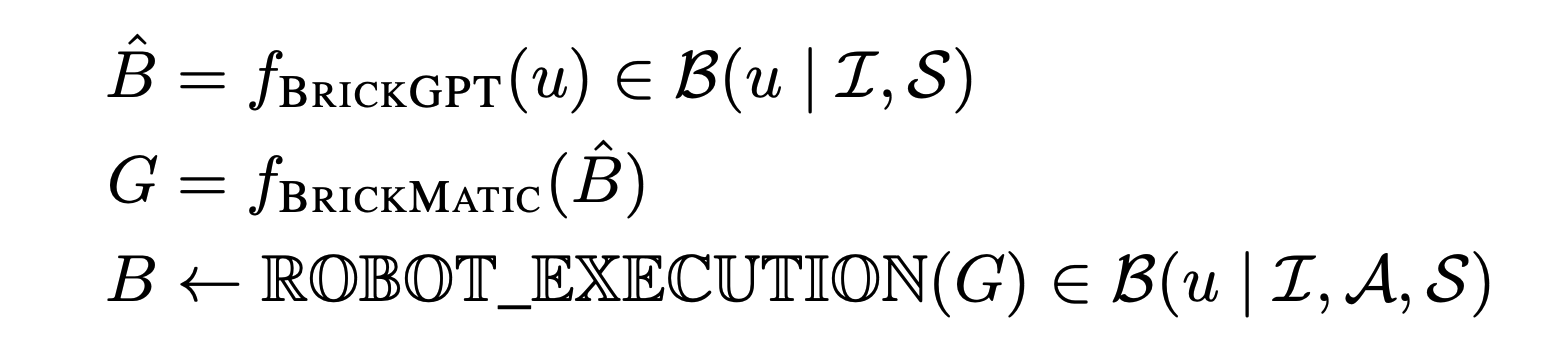
An autoregressive language model that generates physically stable, buildable LEGO designs directly from natural-language descriptions — the generative designer used in Prompt-to-Product.